Las pinzas robóticas se hallan en pleno avance investigando alternativas de sujeción distintas. Esto es lo que ocurre en el caso de la pinza acústica de la investigación Schuck, la cual está siendo realizada en la Universidad de ETH Zurich. A través de ultrasonidos, permitirá coger elementos sin tener que tocarlos.
Marcel Schuck es un investigador de 31 años de la Universidad de ETH Zurich. En la actualidad se halla estudiando con los fondos de su ETH Pioneer Fellowship el desarrollo de una pinza robótica mediante tecnología de ondas sonoras. La singularidad de este Gripper para este brazo robótico es que permite agarrar objetos minúsculos y delicados sin la obligación de manipularlos.
El objetivo es conseguir proporcionar al sector de la Automatización Industrial nuevas oportunidades de manejo de elementos. Para ello se hallan explorando los campos posibles de utilización en la industria.
Se estima que será de gran utilidad para manejar elementos particularmente de gran valor que sean quebradizos. Algunas de las utilizaciones posibles serían en la industria de la relojería o en la realización de microchips.
Ahora, para no estropear los elementos, se usan pinzas suaves convencionales similares al caucho. Son perfectas para manipular cosas frágiles, pero tienen ciertas limitaciones de certeza en el posicionamiento a más de ser contaminantes.
Schuck No-Touch Robotics es como se llama el proyecto y aplica tecnología espacial. Esencialmente se basa en un efecto que se viene utilizando desde hace más de 80 años. Son ondas de ultrasonido que causan un campo de presión totalmente imperceptible para las personas.
Concretamente hay unos puntos de presión que se producen debido a que las ondas acústicas se superponen entre sí. Este movimiento origina que una pieza pueda permanecer levitando en el aire.
Una de las ventajas que proporciona el sistema de sujeción por ultrasonidos es que puede agarrar piezas con distintas geometrías sin que tengamos que cambiar las pinzas de agarre.
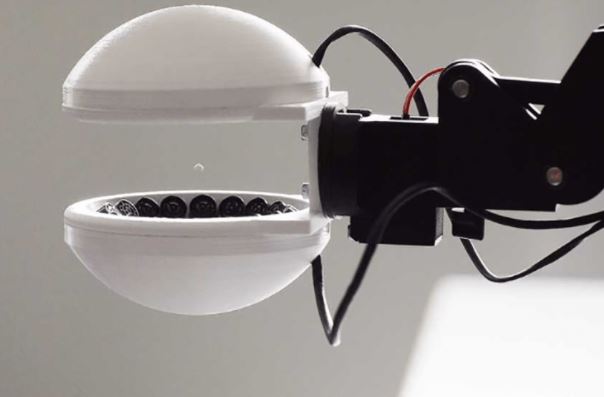
Marcel Schuck espera poder controlar la pinza electrónicamente por ultrasonido a través de un software que controle a su vez el brazo robótico. Para conseguirlo, ha instalado diversos altavoces de reducidas medidas en las 2 pinzas con forma de esfera personalizadas en una impresora 3D.